近日,中国博士后科学基金会公布了第68批博士后基金面上项目资助名单,上海交通大学密西根学院博士后钱烨强的课题《面向无人驾驶3D目标检测的多源异构数据融合方法研究》成功入选。
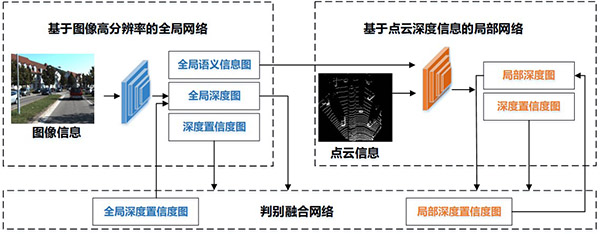
高分辨率的融合特征图生成方法
在无人驾驶目标检测领域中,有多种常用的异构数据传感器。把激光雷达精确的三维点云数据与相机高分辨率的色彩信息结合,有望解决使用单一传感器时点云数据稀疏,图像数据缺少深度信息的缺点。为了解决无人驾驶系统中使用多源异构传感器进行 3D 目标检测的难题,本课题以相机和激光雷达作为传感器,开展对多源异构数据融合新方法的研究。该课题研究内容包括 3D 目标的多源异构数据高精度配准方法,3D 目标的多源异构数据高分辨率特征图生成方法和 3D 目标的多源异构信息高效融合方法。
中国博士后科学基金是专门用于资助在站博士后科学研究的基金,旨在鼓励和支持具有创新思维和创新能力的年轻优秀博士后研究人员开展科研工作,培养社会主义现代化建设需要的跨学科、复合型、战略型高层次人才。博士后基金每年可申请三次,其中一次为特别资助,两次为面上资助。
背景介绍
 钱烨强博士现为密西根学院杨明教授课题组博士后,研究方向为无人驾驶感知技术,目前已在TITS,TMM、TIP等期刊发表学术论文十余篇。2015年于湖南大学自动化专业获得学士学位,2020年于上海交通大学控制科学与工程专业获得博士学位,曾在2018年赴美国卡内基梅隆大学进行博士生联合培养,合作导师为John M. Dolan教授。
钱烨强博士现为密西根学院杨明教授课题组博士后,研究方向为无人驾驶感知技术,目前已在TITS,TMM、TIP等期刊发表学术论文十余篇。2015年于湖南大学自动化专业获得学士学位,2020年于上海交通大学控制科学与工程专业获得博士学位,曾在2018年赴美国卡内基梅隆大学进行博士生联合培养,合作导师为John M. Dolan教授。




