The University of Michigan – Shanghai Jiao Tong University Joint Institute (UM-SJTU JI, JI hereafter) undergraduate student Kezhi Li has published a research paper titled “Forehead or Headlights – At Which Height Should LiDARs Be Mounted on the Vehicle?” in IEEE Transactions on Intelligent Vehicles, a top journal in intelligent vehicles with an impact factor of 8.2. Li is the first author of the article investigating the impact of LiDAR mounting height on perception algorithms in production vehicles. Two SJTU professors, Ming Yang and Yeqiang Qian are corresponding authors of the paper.

Driven by national policies and technological advancements, an increasing number of intelligent vehicles are entering the market. To enhance safety in intelligent driving, most of these vehicles are equipped with LiDAR sensors to obtain redundant perception information. A survey of commercially available vehicles reveals significant variations in the mounting height of these LiDAR sensors.
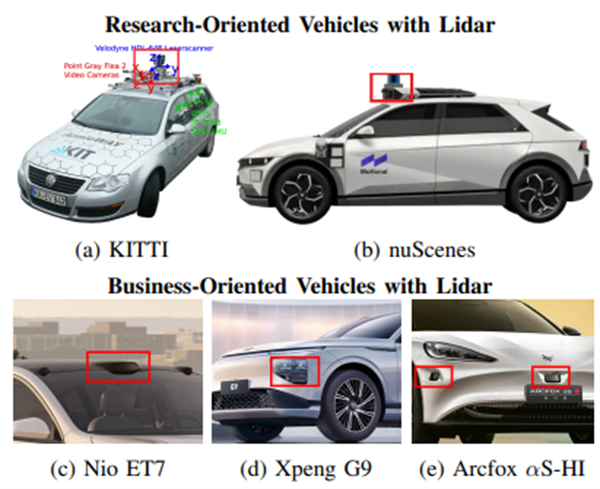
Significant variations in the mounting height of LiDAR sensors
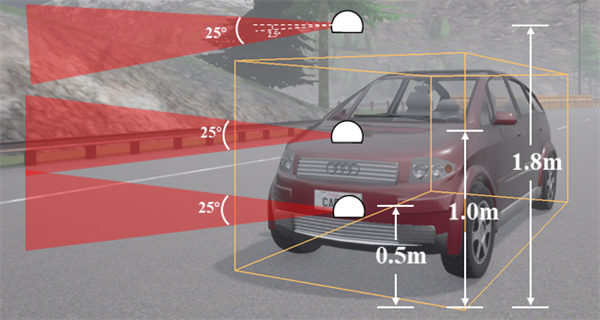
Carla simulation environment
Traditional point cloud datasets, such as KITTI and nuScenes, lack simultaneous LiDAR sensor data at different heights and do not provide ground truth data for all vehicles within scenes. The research team of the published paper utilized the CARLA simulation environment to capture point cloud data from vehicles in highway scenarios, employing LiDAR sensors mounted at three different heights above the ground. The paper also introduced two new metrics: range and importance. Through this dataset, the study conducted a comprehensive analysis of LiDAR sensor perception capabilities at different heights on production vehicles. The dataset is open-source and accessible at: http://www.kaggle.com/datasets/kezhili/height3.
Author Introduction

First author, Kezhi Li is currently a senior student majoring in Electrical and Computer Engineering at JI. While conducting research in Professor Ming Yang’s Intelligent Vehicle Laboratory, he secured a first-place project proposal in the 11th Chun-Tsung Program and received awards such as the National Scholarship

Corresponding author, Ming Yang is Chairman of the JI Council and a distinguished professor of SJTU. He also serves as the director of the SJTU Innovation Center of Intelligent Connected Electric Vehicles. His research primarily focuses on autonomous driving systems.

Corresponding author, Yeqiang Qian is a tenure-track associate professor in the Department of Automation at the SJTU School of Electronic Information and Electrical Engineering. He has previously received the Shanghai Super Postdoctoral Fellowship and the SAA Best Ph.D. Thesis Award, among other accolades. His research primarily revolves around environment perception technologies in intelligent driving.




